首先给出最小生成树的概念:把给定的无向图中转换成一棵树,且树的边权和最小
Prim算法基于贪心的思想,每次在图中选取距离最小生成树最近的点加入树
首先给出朴素的模板算法:
struct edge{
int v,w;
};
int n,m;
vector<edge> e[5010];
int dis[5010];
bool vis[5010];
int cnt,sum;
void init(void){
memset(dis,0x3f,sizeof dis);
}
bool prim(int s){
init();
dis[s]=0;
while(1){
int u=0;
for (int i=1;i<=n;i++){
if (dis[i]<dis[u]&&!vis[i])
u=i;
}
if (u==0) break;
vis[u]=1;
cnt++;
sum+=dis[u];
for (auto it=e[u].begin();it!=e[u].end();it++){
if (dis[it->v]>it->w)
dis[it->v]=it->w;
}
}
return cnt==n;
}其中的
int u=0;
for (int i=1;i<=n;i++){
if (dis[i]<dis[u]&&!vis[i])
u=i;
}
if (u==0) break;作用是找到一个距离最小生成树最近的点(这个点还没有加入树)
如果最后没有找到满足条件的点,就应该结束循环,退出 while(1)
vis[u]=1;//标记找到的这个点已经被加入树中
cnt++;//记录加入树的节点数加一
sum+=dis[u];//最小生成树的边权和然后根据找到的这个点更新它连通的邻点到最小生成树的距离
for (auto it=e[u].begin();it!=e[u].end();it++){
if (dis[it->v]>it->w)
dis[it->v]=it->w;
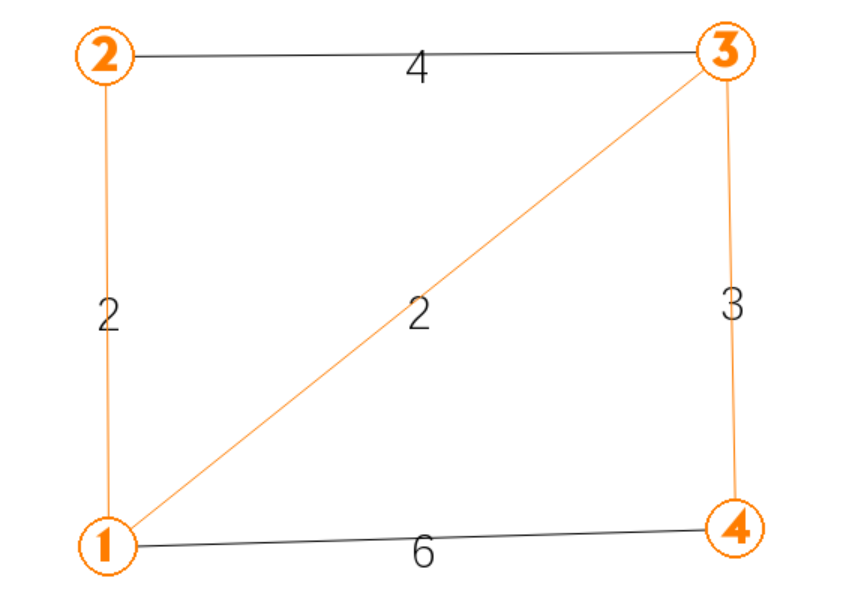
}这里以一个连通图为例:
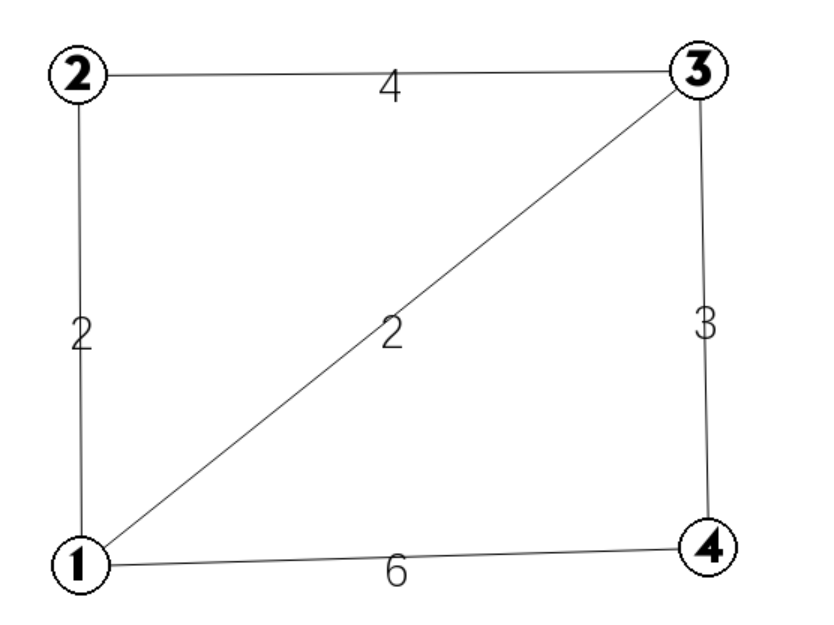
我们可以任意以一个点为 s 即起始点,s=1 时
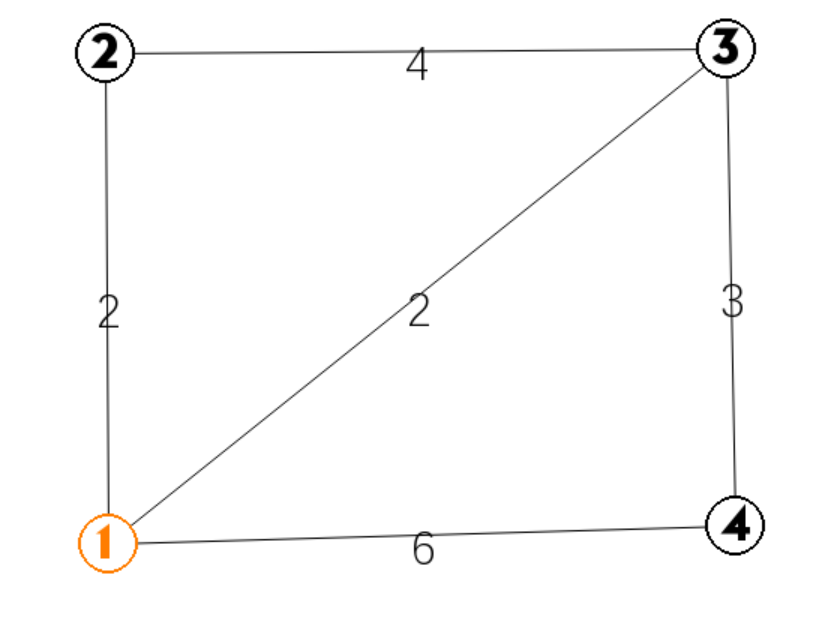
第一轮:
树无节点,此时的dis 为 dis[]={inf,0,inf,inf,inf},从小到大找到 1 为最小点,1 加入最小生成树
然后更新 1 的邻点,dis={inf,0,2,2,6}
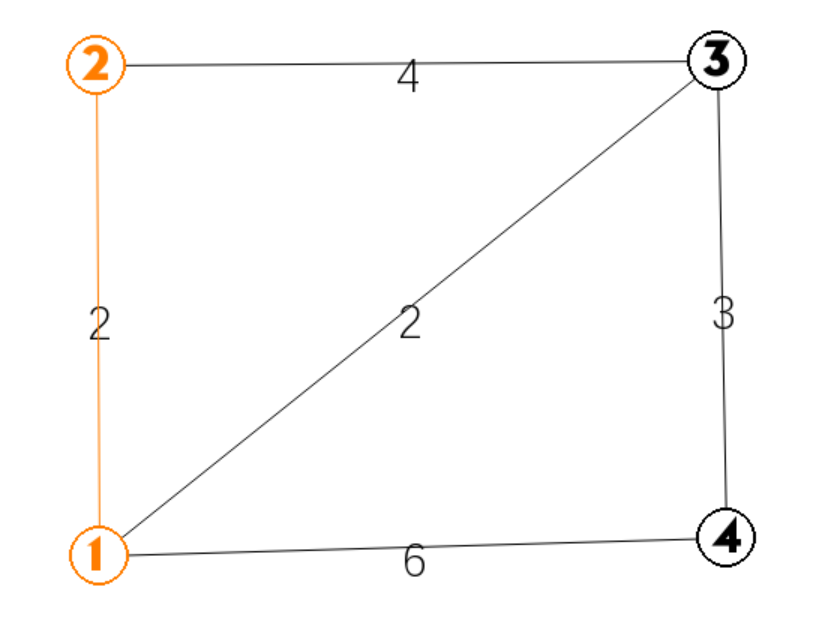
第二轮:
树节点有 1,此时的dis 为 dis[]={inf,0,2,2,6},从小到大找到 2 为最小点,2 加入最小生成树
然后更新 2 的邻点,dis={inf,0,2,2,6}
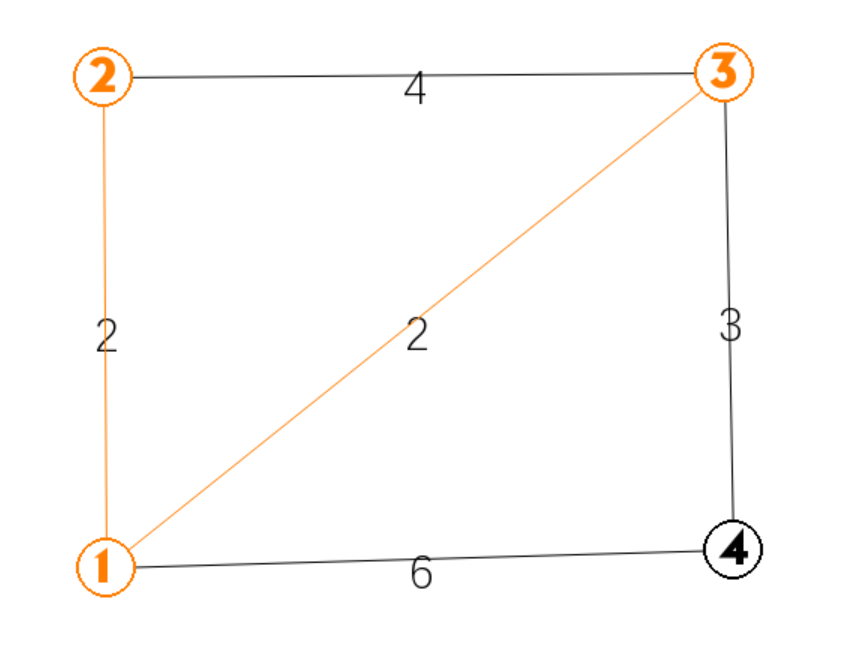
第三轮:
树节点有 1,2,此时的dis 为 dis[]={inf,0,2,2,6},从小到大找到 3 为最小点,3 加入最小生成树
然后更新 3 的邻点,dis={inf,0,2,2,3}
第三轮:
树节点有 1,2,3,此时的dis 为 dis[]={inf,0,2,2,3},从小到大找到 4 为最小点,4 加入最小生成树
然后更新 4 的邻点,dis={inf,0,2,2,3}
第四轮:
树节点有 1,2,3,4,此时的dis 为 dis[]={inf,0,2,2,3},找不到满足条件的点,退出循环
return cnt==n;返回所有的点是否都加入了树,如果没有全部进树,说明存在不连通点
同样的,对于找最近点的操作可以使用 priority_queue 优先队列优化
priority_queue<pair<int,int>> q;
bool prim(int s){
init();
dis[s]=0;
q.push({0,s});
while (q.size()){
auto t=q.top();
q.pop();
if (vis[t.second]) continue;
vis[t.second]=1;
sum-=t.first;
cnt++;
for (auto it=e[t.second].begin();it!=e[t.second].end();it++){
if (dis[it->v]>it->w){
dis[it->v]=it->w;
q.push({-dis[it->v],it->v});
}
}
}
return cnt==n;
}使用优先队列优化后仍然不要忘记判断点和树的关系
if (vis[t.second]) continue;//如果不是没有进树的点,那就重新找区别于最短路的问题,最小生成树更新边的关系原理不一样
for (auto it=e[u].begin();it!=e[u].end();it++){//此时的u已经进了树
if (dis[it->v]>it->w)//到树的距离为dis[v]和w
dis[it->v]=it->w;//取两者最小,即更新最短距离
}在最小生成树中,把边权重新更新为 到树的最短距离,而非最短路中的到起始点的最短距离
评论区(暂无评论)